PBRT
这一章里,重点会聚焦在着色器代码,实现一个基础的路径追踪渲染器框架
整体框架
// 计算着色器主循环-----------------------------------------------------------------
void main() {
// ...
// 性能常数
const int MAX_BOUNCES = 8;
const int SAMPLES_PER_PIXEL = 16;
const float RUSSIAN_ROULETTE_PROB = 0.8;
vec3 accumulateColor = vec3(0.0);
// 每像素SAMPLES_PER_PIXEL次采样
for (uint samples = 0; samples < SAMPLES_PER_PIXEL; ++samples) {
// 生成 ray
// ...
vec3 throughput = vec3(1.0); // 光线当前bounce的能量
vec3 radiance = vec3(0.0);
// 每次采样MAX_BOUNCES次反弹
for (uint bounce = 0; bounce < MAX_BOUNCES; ++bounce) {
// 场景射线追踪--------------------------------------------------------------
HitInfo hitInfo;
hitInfo.tWorld = 1e20;
hitInfo.hit = false;
traceTLAS_stack(tlasRoot, rayOrig, rayDir, hitInfo);
// 检测沿此方向的光源--------------------------------------------------------
// ...
// 若击中,累积radiance并退出当前samples
radiance += throughput * lightColor * lightIntensity;
break;
// 获取材质-----------------------------------------------------------
Material mat = materials[hitInfo.materialID];
vec3 N = normalize(hitInfo.normal);
vec3 V = -rayDir;
vec3 albedo = mat.baseColor;
float metallic = mat.metallic;
float roughness = mat.roughness;
// 光线采样、BRDF计算------------------------------------------------------------
// ...
vec3 brdf = kD * diffuse + specular;
// 更新路径贡献
// ...
throughput *= brdf * NdotL / pdf;
// 光线更新
rayOrig = hitInfo.hitPos + N * 1e-4;
rayDir = L;
// 其他更新-----------------------------------------------------
// Russian Roulette(从第三跳开始)
// ...
}
accumulateColor += radiance;
}
accumulateColor /= float(SAMPLES_PER_PIXEL); // 平均
// 帧间缓存
vec3 prevColor = imageLoad(accumImage, ivec2(pixelCoord)).rgb;
vec3 blended = (frameIndex == 0)
? accumulateColor
: (prevColor * frameIndex + accumulateColor) / float(frameIndex + 1);
imageStore(resultImage, ivec2(pixelCoord), vec4(blended, 1.0));
}
应该比较清晰了,标准的路径追踪流程,对于每个像素,采样SAMPLES_PER_PIXEL次,每次采样发出一根光线,反弹至打到光源/俄罗斯轮盘赌触发/达到MAX_BOUNCES等条件,结束当前采样
目前肯定是无法做到实时,添加一个帧间缓存机制,也就是当场景和摄像机都不动时,一直积累结果,并用总积累帧数平均。为此需要添加一个图像用于存储上一帧的结果,并且传入总积累帧数:
// binding = 0: output image (储存最终颜色)
layout(set = 2, binding = 0, rgba32f) uniform writeonly image2D resultImage;
// binding = 1: accumulation image (储存累积颜色)
layout(set = 2, binding = 1, rgba32f) uniform readonly image2D accumImage;
// binding = 2: constants buffer
layout(set = 2, binding = 2) uniform Params {
int frameIndex;
};
在每帧循环的最后,交换两张图片:
// Renderer.cpp :468
// 计算着色器中的双图像交换
std::swap(r_computeImage_writeOnly, r_computeImage_readOnly);
bindImageOfComputePipeline();
目前我们不会交叉写入像素,所以也可以只用一张图片,先读出然后写入,但不够灵活,后面一些效果可能会写入其他像素(并非当前发出光线的像素),提前引入双图像交换机制是比较好的
在每帧写入常量缓冲区中的frameIndex,并累加++,然后在摄像机更新时重置其为0,我这里通过向摄像机中添加一个回调来实现:
r_scene->getCamera()->addCameraUpdateCallback([this](){
r_params.frameIndex = 0;
});
光源求交
向着色器中添加:
bool hitFaceLight(vec3 ro, vec3 rd, out float tMin, out vec3 color, out float intensity);
bool hitDirectionalLight(vec3 rayDir, out vec3 color, out float intensity);
面光源就是简单的和其顶点定义的三角形求交点,方向光的话可以计算一个光线和光源方向的夹角,大于某个阈值则视为命中,这个阈值可以视为光源的”软硬“,并添加边缘羽化过度
多维随机采样
这个我认为是理解起来比较难的部分,涉及到信号采样的理论知识到glsl中实现采样算法的难点,强烈建议看看 https://www.pbr-book.org/3ed-2018/contents 中的第7章 Sampling and Reconstruction和第13章 Monte Carlo Integration。目前主要关注构建低差异序列和如何引入高维扰动即可,这篇文章值得一看:
低差异序列(一)- 常见序列的定义及性质 - 文刀秋二的文章 - 知乎 https://zhuanlan.zhihu.com/p/20197323
我目前的解决方案如下:
// 随机相关
struct RNGState { uint state; }; // 32-bit 状态,一条路径一个实例
RNGState rng_init(uvec2 pixel, uint frame, uint bounce);
uint rng_next(inout RNGState rng);
float rng_nextFloat(inout RNGState rng);
vec2 rng_nextFloat2(inout RNGState rng);
float sobolOwen(uint index, uint scramble, uint dim);
vec2 sobol2D(uint index, uint bounce, uint scramble);
首先是rng:
uint splitmix32(uint x)
{
x += 0x9e3779b9u; // 爬山常量 (φ·2³²)
x ^= x >> 16;
x *= 0x7feb352du;
x ^= x >> 15;
x *= 0x846ca68bu;
x ^= x >> 16;
return x;
}
RNGState rng_init(uvec2 pixel, uint frame, uint bounce)
{
// 先把所有维度搅成一个 32-bit 值
uint seed =
(pixel.x * 1664525u) ^ (pixel.y * 1013904223u) ^
(frame * 69069u) ^ (bounce * 362437u);
seed = splitmix32(seed); // 再做一次 avalanching
return RNGState(seed | 1u); // 避免 state==0
}
uint rng_next(inout RNGState rng)
{
rng.state = rng.state * PCG32_MULT + PCG32_INC; // LCG
uint xorshifted = ((rng.state >> 18u) ^ rng.state) >> 27u;
uint rot = rng.state >> 28u;
return (xorshifted >> rot) | (xorshifted << ((32u - rot) & 31u));
}
这里是一个PCG32系列的随机数生成器算法,基本上从LCG升级而来,适合解决LCG中的低维相关性问题,这里主要用于解耦每像素位置/帧时间的相关性,这里的bounce是个可选项,其在sobol算法中被打散效果会更好。具体原理说实话很难懂,用就完了
紧接着是sobol采样器:
uint reverseBits(uint v)
{
return bitfieldReverse(v); // 反转 32 bit;高低位互换
}
// 单维 Owen scramble
float sobolOwen(uint index, uint scramble, uint dim) {
index = reverseBits(index);
index ^= splitmix32(scramble ^ dim); // 每维扰动
return float(index) * 2.3283064365386963e-10;
}
// 生成 (d0,d1) 两维,dPair 起点随 bounce 递增
vec2 sobol2D(uint index, uint bounce, uint scramble) {
uint d0 = bounce * 2u + 0u; // 每个 bounce 占两维
uint d1 = bounce * 2u + 1u;
return vec2(
sobolOwen(index << 0u, scramble, d0), // 维度哈希进 index
sobolOwen(index << 0u, scramble, d1)
);
}
这里的index = reverseBits(index);等价于构建了Van der Corput序列,剩下的参见上面说的文章,scramble传入RNGState,就能生成在:像素位置+帧时间+采样次数+反弹次数, 五个维度”均匀“分布的点了
如果你的渲染器出现了下面这种多光斑/结构性伪影(下图只有一个面光源):
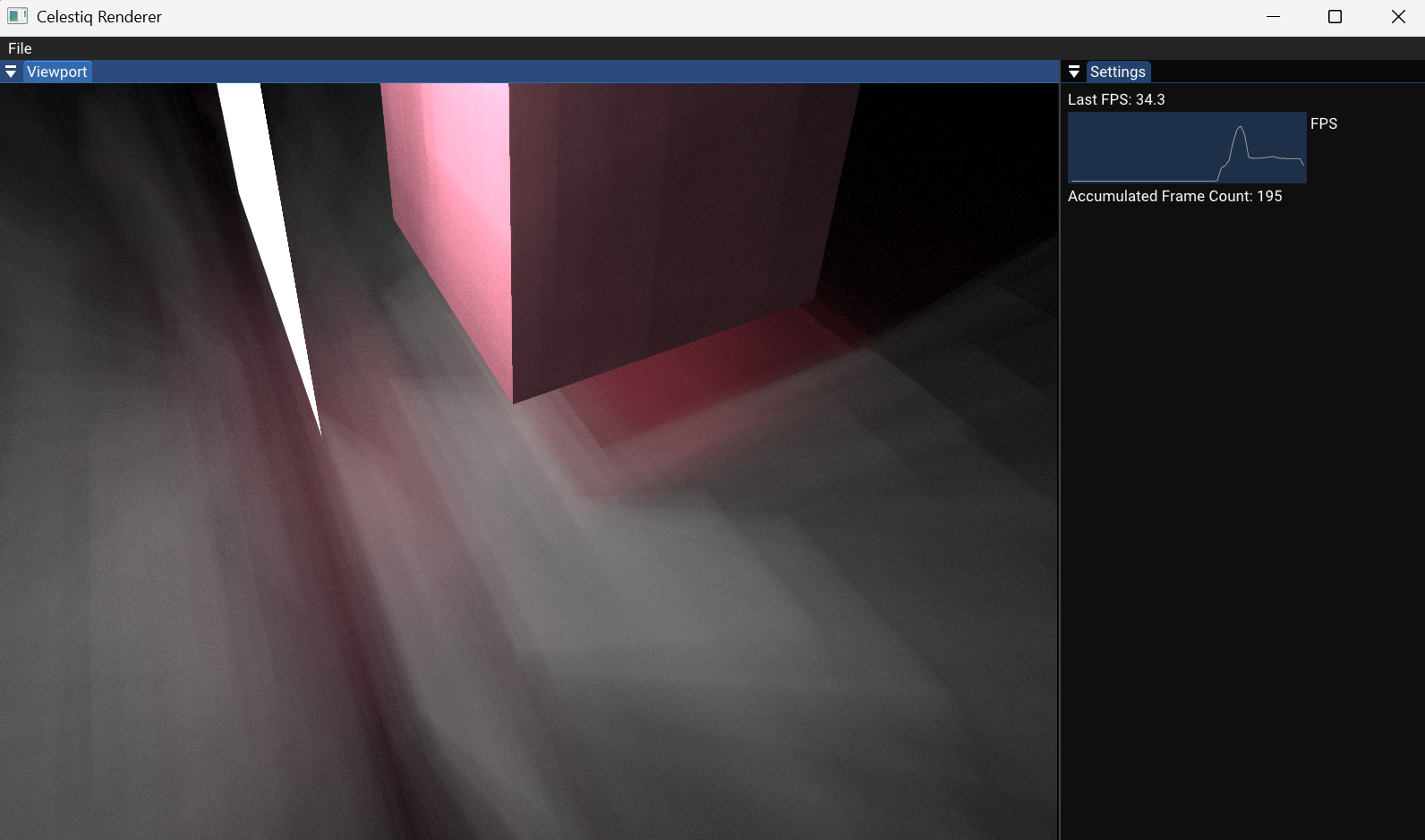
基本可以确定是随机数生成出了问题,存在某个或多个维度出现了混杂,说实话很难排查具体是哪里的问题,要想彻底解决,需要对每一个需要随机决策的维度都单独做去相关,那个就很复杂了。我也是尝试了很多版,才确定了上面的可用且比较简单的版本
BRDF
接下来就是计算BRDF了,肯定还是沿用经典的Cook-Torrance,这个在LearnOpenGL中有详细讲解,不详细说了
// Cook-Torrance specular BRDF
vec3 fresnelSchlick(float cosTheta, vec3 F0);
float DistributionGGX(vec3 N, vec3 H, float roughness);
float GeometrySchlickGGX(float NdotV, float roughness);
float GeometrySmith(vec3 N, vec3 V, vec3 L, float roughness);
光线采样
光线在每次反弹时发生的事,就需要深刻的理解如何使用蒙特卡洛来计算渲染方程了:
连续版本的渲染方程(Rendering Equation) :
蒙特卡洛积分进行估计:
应用到渲染方程中(记
:在单位半球上采样方向 的概率密度函数(PDF)
先忽略发光项,因为路径追踪是原本渲染方程所定义的一个反向过程,考虑第一次反弹,可以将
将原来的光线强度(刚出发时定义为1.0),乘以这个计算出的部分,就可以看作是反弹后的光线携带的能量
对于
// 光线采样相关
vec3 uniformSampleHemisphere(vec2 Xi, vec3 N); // 半球均匀采样
vec3 cosineSampleHemisphere(vec2 Xi, vec3 N); // 余弦加权采样
vec3 ImportanceSampleGGX(vec2 Xi, vec3 N, float roughness); // GGX重要性采样
一开始就用半球均匀采样进行测试。所谓重要性采样,就是选择:在具有更高贡献度的光线可能的方向,对应有更高概率分布的
路径追踪
首先在主函数开头:
void main() {
uvec2 pixelCoord = gl_GlobalInvocationID.xy; // 当前像素坐标
ivec2 imageSize = imageSize(resultImage);
if (pixelCoord.x >= imageSize.x || pixelCoord.y >= imageSize.y)
return;
RNGState rng = rng_init( pixelCoord, frameIndex, 0u ); // 初始化随机数生成器
const int MAX_BOUNCES = 8;
const int SAMPLES_PER_PIXEL = 16;
const float RUSSIAN_ROULETTE_PROB = 0.8;
int tlasRoot = int(tlasNodes.length()) - 1;
vec3 accumulateColor = vec3(0.0);
for (uint samples = 0; samples < SAMPLES_PER_PIXEL; ++samples) {
// ...
}
}
一些准备工作,用pixelCoord和frameIndex初始化了随机数生成器,这里先忽略了第三个参数,其实直接删了也行。然后是每个像素:
for (uint samples = 0; samples < SAMPLES_PER_PIXEL; ++samples) {
// Optional: 不同 sample 用一次跳跃 (‘leapfrog’) 防止序列重叠
rng.state += 0x9e3779b9u;
// 生成 ray
vec2 subPixel = vec2(rng_nextFloat(rng), rng_nextFloat(rng)); // tent filter 更好
vec2 ndc = ((vec2(pixelCoord) + subPixel) / vec2(imageSize)) * 2.0 - 1.0;
vec4 rayClip = vec4(ndc, -1.0, 1.0);
vec4 rayView = inverse(viewProjectionMatrix) * rayClip;
rayView /= rayView.w;
vec3 rayOrig = cameraPosition;
vec3 rayDir = normalize(rayView.xyz - cameraPosition);
vec3 throughput = vec3(1.0); // 光线初始强度
vec3 radiance = vec3(0.0);
for (uint bounce = 0; bounce < MAX_BOUNCES; ++bounce) {
// ...
}
}
每次采样生成光线时,添加一个像素内的扰动,可以加速收敛、抗锯齿等
最后对于每次采样:
for (uint bounce = 0; bounce < MAX_BOUNCES; ++bounce) {
// 场景射线追踪--------------------------------------------------------------
HitInfo hitInfo;
hitInfo.tWorld = 1e20;
hitInfo.hit = false;
traceTLAS_stack(tlasRoot, rayOrig, rayDir, hitInfo);
// 检测沿此方向的光源--------------------------------------------------------
bool lit = false;
vec3 lightColor;
float lightIntensity;
float tLight = 1e30; // 默认“无光源”
// 面光:返回距离 (tLight) + 颜色 / 强度
if (hitFaceLight(rayOrig, rayDir, tLight, lightColor, lightIntensity)) {
if (tLight < hitInfo.tWorld - 1e-4) { // 最近的是光,不是物体
if (bounce == 0){
radiance += throughput * lightColor; // 首次即命中面光源,直接返回,用于标识灯光位置
break;
}
radiance += throughput * lightColor * lightIntensity;
lit = true; // 直接出循环(不再反弹)
}
}
// 方向光 == “无限远平行光”
// 只要射线方向与方向光方向相同,且前方没有任何几何体挡住,就可直接累加
if (!lit && hitDirectionalLight(rayDir, lightColor, lightIntensity)) {
if (!hitInfo.hit && bounce > 0) { // 没有物体挡住 → 可见
radiance += throughput * lightColor * lightIntensity;
lit = true;
}
}
if (lit) break; // 本路径在此方向已“见光”,结束本 bounce
if (!hitInfo.hit) break;
// 获取材质-----------------------------------------------------------
Material mat = materials[hitInfo.materialID];
vec3 N = normalize(hitInfo.normal);
vec3 V = -rayDir;
vec3 albedo = mat.baseColor;
float metallic = mat.metallic;
float roughness = mat.roughness;
// 光线采样、BRDF计算------------------------------------------------------------
vec2 Xi = sobol2D(samples, bounce, rng.state); // 生成二维随机向量
vec3 L = uniformSampleHemisphere(Xi, N); // 半球均匀采样 L
vec3 H = normalize(V + L); // 反射向量 H
float NdotL = max(dot(N, L), 0.0);
if (NdotL <= 0.0) break;
// Fresnel 基础反射率
vec3 F0 = mix(vec3(0.04), albedo, metallic);
vec3 F = fresnelSchlick(max(dot(H, V), 0.0), F0);
// Cook-Torrance BRDF
float NDF = DistributionGGX(N, H, roughness);
float G = GeometrySmith(N, V, L, roughness);
vec3 nominator = NDF * G * F;
float denominator = 4.0 * max(dot(N, V), 0.0) * max(dot(N, L), 0.0) + 0.001;
vec3 specular = nominator / denominator;
vec3 diffuse = albedo / PI;
vec3 kS = F;
vec3 kD = vec3(1.0) - kS;
kD *= 1.0 - metallic;
vec3 brdf = kD * diffuse + specular;
// 更新路径贡献
float pdf = 1.0 / (2.0 * PI); // 均匀半球采样 pdf
pdf = max(pdf, 1e-4);
throughput *= brdf * NdotL / pdf;
// 光线更新
rayOrig = hitInfo.hitPos + N * 1e-4; // 防止自交
rayDir = L;
// 其他更新-----------------------------------------------------
// Russian Roulette(从第三跳开始)
if (bounce > 2) {
float p = max(throughput.r, max(throughput.g, throughput.b));
if (rng_nextFloat(rng) > p) break;
throughput /= p;
}
// 更新 rng 的“反弹维度”信息 (可选)
rng.state += uint( bounce * 0x632be59bu ); // decorrelate per bounce
}
应该比较清晰,一个基础的路径追踪比较简单,难点都在上面封装好的函数里面,主循环里基本没有很难理解的地方
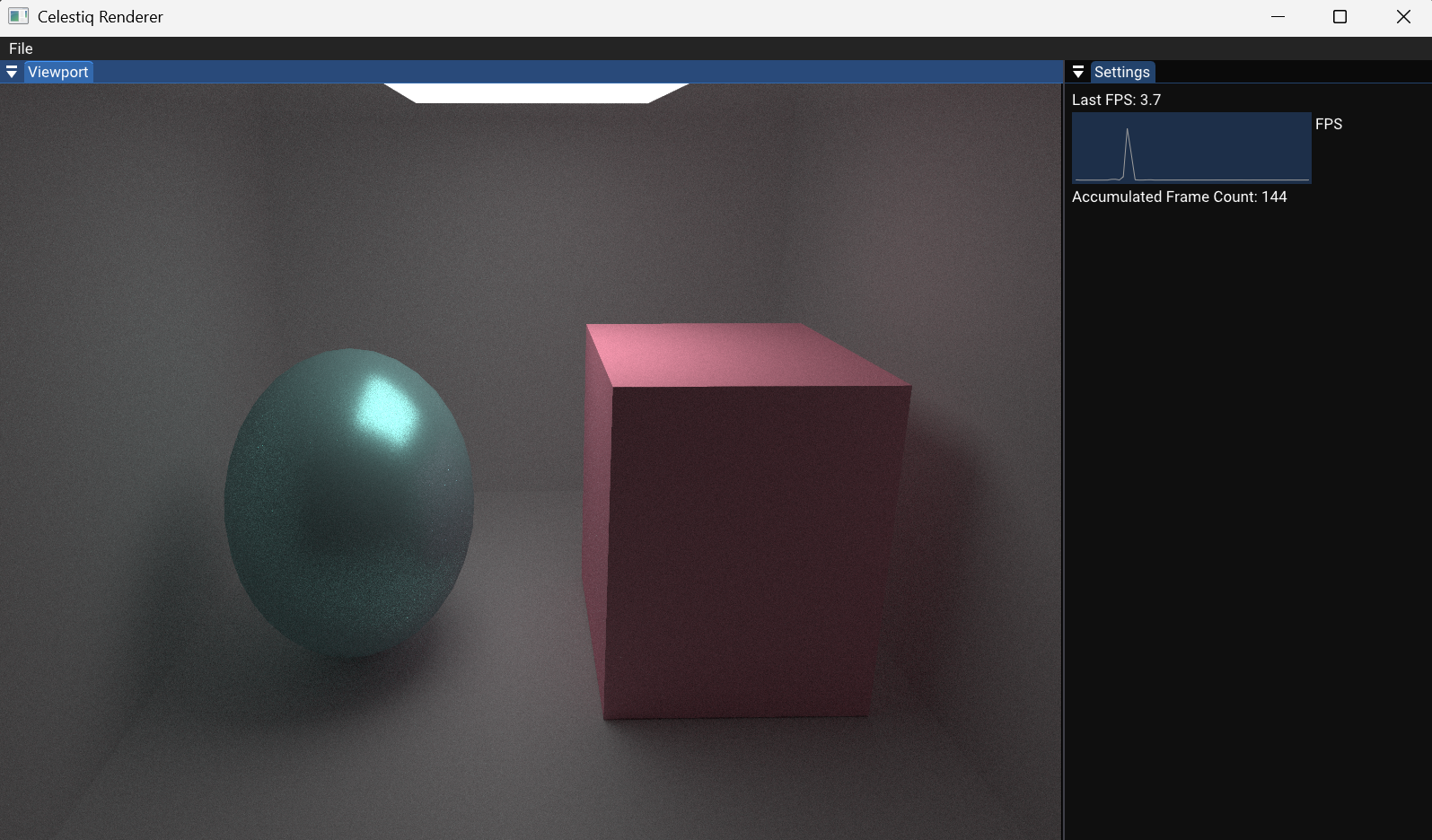
构建
手动创建一个经典的盒子场景,效果还是不错的。但帧数骤降至3到4帧,均匀采样收敛速度很慢,积累大概100帧才勉强可以看,后续细微的噪点也很难消除,这和帧间积累的算法也有关系。下一节中我们会大幅改进这一点
代码存档
代码下载